Three-Phase Induction Motor – Construction, Working, Types & Applications
Three-Phase Induction Motor – Construction, Operation & Types of 3-Phase Induction Motors
The motor is used to convert an electrical form of energy into mechanical form. According to the type of supply, motors are classified as AC motors and DC motors. In today post, we will discuss the different types of three phase induction motors with working and applications.
The induction motor especially three phase induction motors are widely used AC motor to produce mechanical power in industrial applications. Almost 80% of the motor is a three-phase induction motor among all motors used in industries. Therefore, the induction motor is the most important motor among all other types of motor.
What is a 3-Phase Induction Motor?
A three phase induction motor is a type of AC induction motors which operates on three phase supply as compared to the single phase induction motor where single phase supply is needed to operate it. The three phase supply current produces an electromagnetic field in the stator winding which leads to generate the torque in the rotor winding of three phase induction motor having magnetic field.
Construction of Three-Phase Induction Motor
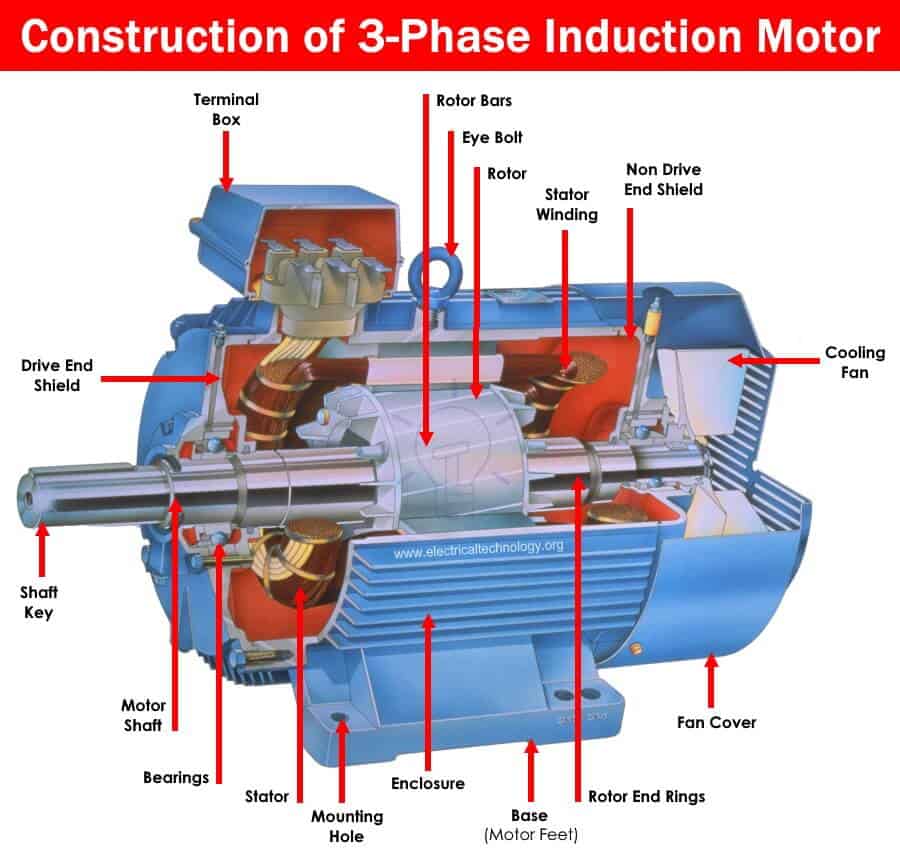
The construction of an induction motor is very simple and robust. It has mainly two parts;
- Stator
- Rotor
Stator
As the name suggests, the stator is a stationary part of the motor. The stator of the induction motor consists of three main parts;
- Stator Frame
- Stator Core
- Stator Winding
Stator Frame
The stator frame is the outer part of the motor. The function of the stator frame is to provide support to the stator core and stator winding.
It provides mechanical strength to the inner parts of the motor. The frame has fins on the outer surface for heat dissipation and cooling of the motor.
The frame is casted for small machines and it is fabricated for a large machine. According to the applications, the frame is made up of die-cast or fabricated steel, aluminum/ aluminum alloys, or stainless steel.
Related Post: Synchronous Motor: Construction, Working, Types & Applications
Stator Core
The function of the stator core is to carry the alternating magnetic flux which produces hysteresis and eddy current loss. To minimize these losses, the core is laminated by high-grade steel stampings thickness of 0.3 to 0.6 mm.
These stampings are insulated from each other by varnish. All stampings stamp together in the shape of the stator core and fixed it with the stator frame.
An inner layer of the stator core has a number of slots.
Stator Winding
The stator winding is placed inside the stator slots available inside the stator core. Three-phase winding is placed as a stator winding. And three-phase supply is given to the stator winding.
The number of poles of a motor depends on the internal connection of the stator winding and it will decide the speed of the motor. If the number of poles is greater, the speed will less and if the number of poles is lesser than the speed will high. The poles are always in pairs. Therefore, the total number of poles always an even number. The relation between synchronous speed and number poles is as shown in the below equation,
NS = 120f / P
Where;
- f = Supply Frequency
- P = Total Number of Poles
- Ns = Synchronous Speed
As the end of winding connected to the terminal box. Hence, there are six terminals (two of each phase) in the terminal box.
According to the application and type of starting methods of motors, the stator winding is connected in star or delta and it is done by the connection of terminals in the terminal box.
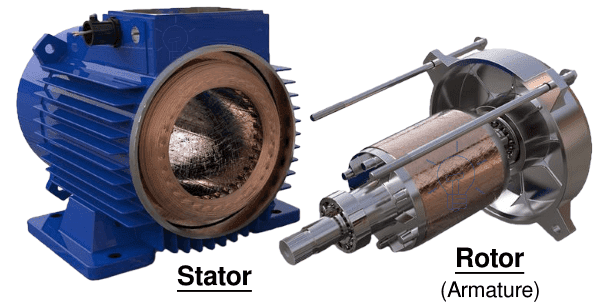
Rotor
As the name suggests, the rotor is a rotating part of the motor. According to the type of rotor, the induction motor is classified as;
- Squirrel Cage Induction Motor
- Phase Wound (Wound Rotor) Induction motor / Slip-ring Induction Motor
The construction of the stator is same in both types of induction motors. We will discuss the types of rotors used in 3-phase induction motors in the following section of types of three phase induction motors.
Types of Three Phase Induction Motors
Three phase motors are classified mainly in two categories based on the rotor winding (Armature coil winding) i.e. squirrel cage and slip ring (wound rotor motor).
- Squirrel Cage Induction Motor
- Slip-ring or Wound Rotor Induction Motor
Related Post: Brushless DC Motor (BLDC) – Construction, Working Principle & Applications
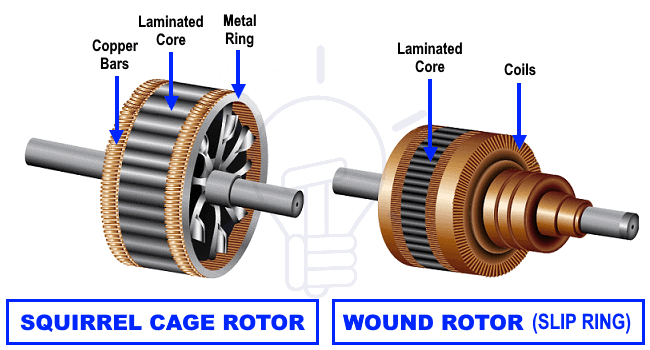
Squirrel Cage Induction Motor
The shape of this rotor is resembling the shape of the cage of a squirrel. Therefore, this motor is known as a squirrel cage induction motor.
The construction of this type of rotor is very simple and rugged. So, almost 80% of the induction motor is a squirrel cage induction motor.
The rotor consists of a cylindrical laminated core and has slots on the outer periphery. The slots are not parallel but it is skewed at some angle. It helps to prevent magnetic locking between the stator and rotor teeth. It results in smooth operation and reduces the humming noise. It increases the length of the rotor conductor due to this the rotor resistance is increased.
The squirrel cage rotor consists of rotor bars instead of the rotor winding. The rotor bars are made up of aluminum, brass, or copper.
Rotor bars are permanently shorted by end rings. So, it makes a complete close path in the rotor circuit. The rotor bars are welded or braced with the end rings to provide mechanical support.
The rotor bars are short-circuited. Therefore, it is not possible to add external resistance to the rotor circuit.
In this type of rotor, the slip rings and brushes are not used. Hence, the construction of this type of motor is simpler and more robust.
Slip-ring or Wound Rotor Induction Motor
Slip-ring induction motors are also known as wound rotor motor. The rotor consists of a laminated cylindrical core with slots on the outer periphery. The rotor winding is placed inside the slots.
In this type of rotor, the rotor winding is wounded in such a way that, the number of poles of rotor winding is the same as the number of poles of the stator winding. The rotor winding can be connected as a star or delta.
End terminals of rotor windings are connected to the slip-rings. So, this motor is known as a slip-ring induction motor.
The external resistance can easily connect with the rotor circuit through the slip-ring and brushes. And it is very useful for controlling the speed of the motor and improving the starting torque of the three-phase induction motor.
An electrical diagram of slip-ring three-phase induction motor with external resistance is shown in the below figure.
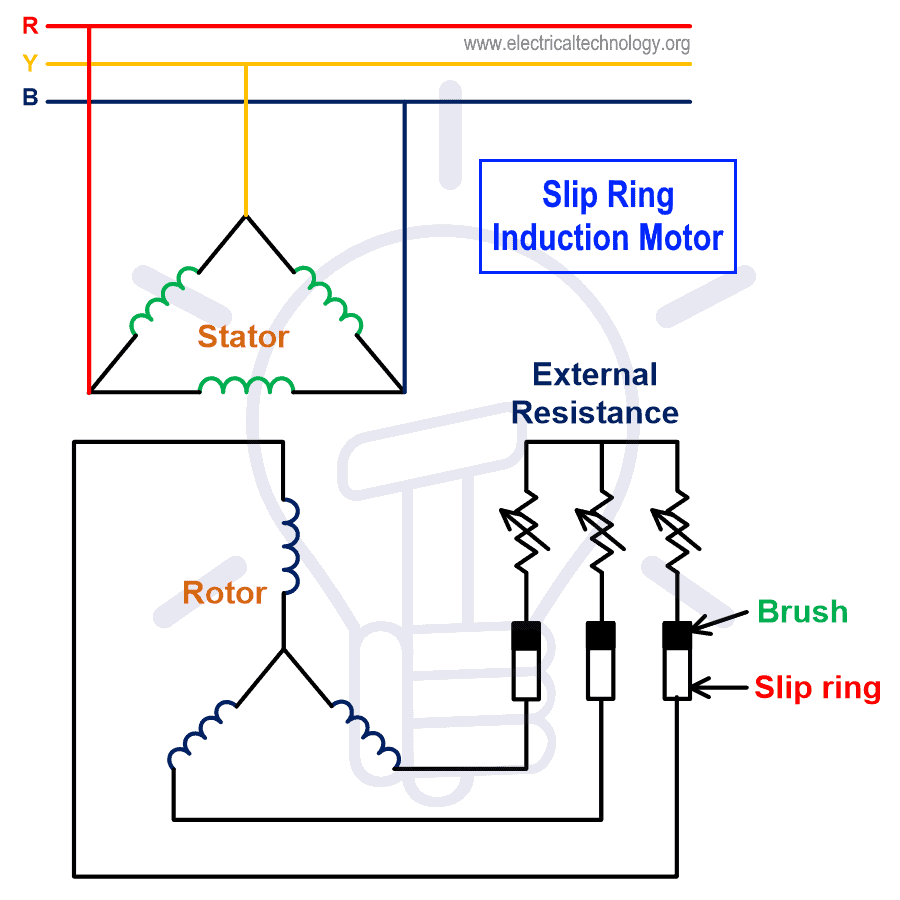
The external resistance is used only for the starting purpose. If it is remains connected during the running condition, it will increase the rotor copper loss.
High rotor resistance is good for the starting condition. So, the external resistance is connected with the rotor circuit during the starting condition.
When motor running near the speed of the actual speed, the slip-rings are short-circuited by the metal collar. By this arrangement, the brushes and external resistance is removed from the rotor circuit.
This reduces the rotor copper loss as well as friction in brushes. The rotor construction is a little bit complicated compared to the squirrel cage motor due to the presence of brushes and slip-rings.
The maintenance of this motor is more. So, this motor only used when variable speed control and high starting torque are needed. Otherwise, the squirrel cage induction motor is more preferred over slip-ring induction motor.
- Related Post: Cable Size Calculation for LT & HT Motors
Working Principle of 3-Phase Induction Motor
The stator winding is overlapped at 120˚ (electrically) to each other. When a three-phase supply is given to the stator winding, the rotating magnetic field (RMF) induced in the stator circuit.
The speed of the rotating magnetic field is known as synchronous speed (NS).
According to Faraday’s law, EMF induced in the conductor due to the rate of change of flux (dΦ/dt). The rotor circuit cut the stator magnetic field and an EMF induced in the rotor bar or rotor winding.
The rotor circuit is a close path. So, due to this EMF current will flow through the rotor circuit.
Now, we know that the current-carrying conductor induces the magnetic field. So, the rotor current induces a second magnetic field.
The relative motion between the stator flux and rotor flux, the rotor starts to rotate to reduce the cause of relative motion. The rotor tries to catch the stator flux and starts rotating.
The direction of rotation is given by the Lenz’s law. And is in the direction of the rotating magnetic field induced by the stator.
Here, the rotor current is produced due to inductance. Therefore, this motor is known as the induction motor.
The speed of the rotor is less than the speed of synchronous speed. The rotor tries to catch the rotating magnetic field of the stator. But it never catches it. Hence, the speed of the rotor is slightly less than the speed of synchronous speed.
The synchronous speed depends on the number of poles and supply frequency. The difference between the actual speed of the rotor and synchronous speed is known as slip.
- Related Post: Motor Efficiency and How to improve it?
Why the slip is never zero in an induction motor?
When the actual speed of the rotor is equal to the synchronous speed, the slip is zero. For the induction motor, this condition will never happen.
Because when the slip is zero, both speeds are equal and there is no relative motion. Therefore, no EMF induced in the rotor circuit and rotor current is zero. Hence, the motor cannot run.
The induction motor is a widely used motor in industries. Because it has more advantages than disadvantages.
Advantages & Disadvantages of 3-Φ Induction Motors
Advantages
The advantages of induction motor are listed as below,
- The construction of a motor is very simple and robust.
- The working of an induction motor is very simple.
- It can operate in any environmental condition.
- The efficiency of the motor is very high.
- The maintenance of an induction motor is less compared to other motors.
- It is a single excited motor. Hence, it needs only one supply of source. It does not require external DC supply for excitation like a synchronous motor.
- The induction motor is a self-starting motor. So, it does not require any extra auxiliaries for the starting purpose for normal operation.
- The cost of this motor is very less compared to other motors.
- The life span of this motor is very high.
- Armature reaction is less.
- Related Post: DC Machine – Construction, Working, Types and Applications
Disadvantages
The disadvantages of the motor are listed as below;
- During light load condition, the power factor is very less. And it draws more current. So, the copper loss is more which reduce the efficiency during light load condition.
- The starting torque of this motor (squirrel cage induction motor) is not less.
- The induction motor is a constant speed motor. For the application where variable speed requires, this motor is not used.
- Speed control of this motor is difficult.
- The induction motor has a high starting inrush current. This causes a reduction in voltage at the time of starting.
Application of 3-Phase Induction Motors
The induction motor is mostly used in industrial applications. The squirrel cage induction motors are used in residential as well as industrial applications especially where the speed control of motors is not needed such as:
- Pumps and submersible
- Pressing machine
- Lathe machine
- Grinding machine
- Conveyor
- Flour mills
- Compressor
- And other low mechanical power applications
The slip ring motors are used in heavy load applications where the high initial torque is needed such as:
- Steel mills
- Lift
- Crane Machine
- Hoist
- Line shafts
- and other heavy mechanical workshops etc.
Related Posts:
- Difference Between Single Phase & Three Phase Induction Motor
- Why Motor rated in kW instead of kVA?
- Direct Online Starter – DOL Starter Wiring Diagram for Motors
- Electrical Transformer – Construction, Working, Types and Applications
- Alternator or Synchronous Generator: Construction, Working, Types & Applications
- Induction Generator or Asynchronous Generator: Construction & Working
- Speed Control of DC Motor – Voltage, Rheostatic & Flux Control Methods
- AC Drive – Working and Types of Electrical Drives & VFD
- DC Drive – Working and Types of DC Drives
- Three Phase Motor Power & Control Wiring Diagrams
- Electric Motors Symbols
- Applications of Electric Motors







Thank you for simple explanation about 3-Phase induction motors.
Well explained about the difference between Online UPS and Offline UPS…. Thanks for s
haring with us