General Requirements for the Design, Installation, and Protection of Motors, Motor Circuits, Controllers, and Disconnects – 2023 NEC Article 430
As discussed in part 1, motor circuits differ significantly from general electrical circuits due to their high inrush current at startup. When a motor starts, its inductive load causes it to draw an inrush current that is typically 6 to 8 times higher than its full load current (FLC). Because of this high starting current, motor circuit requirements differ from those of general circuits. For example, the sizing of conductors and overcurrent protection for motor circuits must be designed differently than for lighting circuits or equipment with resistive loads.
To address these considerations, NEC Article 430 provides detailed guidelines for motor circuits and controllers. This article helps determine the appropriate conductor size, branch circuit protection, feeder protection, controller specifications, control circuit conductors, overload protection, and disconnecting means to ensure safe safe installation and operation of electric motors.

NEC Article-430 Requirements for Motors
The National Electrical Code (NEC) 2023 outlines comprehensive rules and regulations for motor circuits. It explains the designing of motor circuits, calculation and installations to ensure safety, efficiency, and compliance with electrical standards. The extensive and compressive Article – 430 discusses the key requirements related to motors, covering motor locations, conductor sizing, overcurrent protection, disconnects, and controllers.
Motor Locations
The NEC defines requirements for motor locations based on environmental factors such as:
- Motor Locations: Motors must have proper ventilation and be easily accessible for maintenance (430.14(A)).
- Open Motors: Motors with an open commutator or collector rings must be installed in a way that prevents sparks from igniting nearby combustible materials (430.14(B)).
- Damp and Wet Locations: Motors must have appropriate enclosures (e.g., NEMA-rated) to prevent water ingress.
- Hazardous Locations: Motors in Class I, II, or III hazardous locations must be explosion-proof or specially approved for such environments per NEC Article 500.
- Readily Accessible Locations: Disconnecting means and controllers must be accessible for maintenance and emergency shut-off.
Highest Rated Motor
When multiple motors are supplied by a single feeder, the highest-rated motor affects conductor sizing and overcurrent protection (430.24). NEC 2023 requires the largest motor to be factored at 125% of its full-load current (FLC) when determining conductor size and protection ratings (430.17). The values of full load current (FLC) for different types of motors are given in Tables 430.247 430.248 430.249 and 430.250.
Motor Conductor Size
According to (430.6(A)(1) & 430.22(A) through (G)), conductors for single motor circuit must be sized based on FLC values listed in NEC Tables 430.247 through 430.250. For instance:
- Conductors must carry at least 125% of the motor’s FLC.
- Conductors must be rated for the motor’s voltage and insulation type.
- Ampacity adjustment may be required for bundled or high-temperature conditions. Conductor ampacity must be corrected based on ambient temperature and conduit fill factors if applicable (310.15(C)(1)).
Feeder conductors supplying multiple motors are sized based on values of FLC (Tables 430.247 through 430.250) in accordance with 430.24(1) through (4) as follow:
- 125% of the full-load current (FLC) of the highest-rated motor (430.6(A), 430.17 & 430.24).
- The sum of the FLCs of all other motors on the same phase (430.6(A)).
- 100% of non-continuous loads and 125% of continuous non-motor loads on the feeder.
Motor branch circuit conductors for multiple motors are selected from Table 310.16 based on the terminal temperature rating (60°C, 75°C, or 90°C) as per NEC 430.24.
All motor applications are considered continuous duty unless specified otherwise or controlled for non-continuous operation, such as an elevator motor.
For non-continuous motors, such as those used in short-time, intermittent, periodic, or varying-duty applications, the conductor size is selected based on a percentage of the motor nameplate full load amperes (FLA). According to Table 430.22(E), the conductors used for such motors must have an ampacity equal to the specified percentage of the motor’s FLA.
Warning: Do Not use the FLA rating of motor for sizing conductors. Instead, Use the FLC values in NEC tables. FLA rating is used for overload protection.
Sizing Motor Branch-Circuit Protection
An OCPD (overcurrent protective device) is used for branch circuit protection. These OCPDs (such as fuses and circuit breakers) protect the motor branch circuit conductors against short circuit and ground faults. (430.51)
According to 430.52(B), The rating of an OCPD device must capable to safely handle the high starting current of motor. OCPDs for motor branch circuit are used in accordance with 430.52(A), 430.52(B) through (D).
OCPD’s devices for motor branch circuit conductors against short circuit and ground faults are sized based on Table 430.52(C)(1). If the calculated value is not a standard ampere ratings, the next available standard rating or setting listed in 240.6 shall be selected. (430.52(C)(1)(A)).
Note: Branch circuit protection does not protect against overload conditions.
Per NEC 430.52 and Table 430.52(C)(1), the setting and rating of short-circuit and ground-fault protection must be sized based on motor type:
- Non-time delay Fuses: Typically sized at 150 to 300% for non-time delay fuses
- Time Delay Fuses: Dual element time delay fuses are sized at 150 to 175% of FLC.
- Instantaneous trip breakers: They are sized at 250 to 1100% of FLC (allowed but with manufacturer-specified limits.)
- Inverse-time Circuit Breakers: Generally limited to 150 to 250% of motor FLC.
Good to Know: If the standard breaker or fuse rating does not match the allowed percentage, the next higher standard size can be used (NEC 240.6(A)).
Motor Feeder Protection (NEC 430.62)
Feeder conductors for motors are sized based on NEC 430.24. The maximum allowable rating for a specific protective device is determined by 430.52 or 440.22(A).
- Feeder protection must be sized to protect the largest motor at 250% of FLC plus the sum of all other motors at 100% of their FLC (430.62).
- If multiple motors are supplied by the same feeder, each branch circuit must have its own short-circuit and ground-fault protection.
Motor Overload Protection
When the current exceeds the conductor ampacity due to equipment operating above its normal current rating, it is known as an overload condition. This type of overcurrent causes excessive heating, which can lead to equipment failure, inability to start, damage, or even fire hazards.
NEC 430.32(A) mandates overload protection to prevent overheating:
- Motors with a service factor of 1.15 or greater: Overloads set at 125% of FLC.
- Motors without service factor adjustments: Overloads set at 115% of FLC.
- Thermal Overloads must trip the circuit when excessive heat is detected.
To protect motors, motor control equipment, and motor branch circuit conductors from overheating, overload protective devices are used.
Types of Overload Protective Devices
- Thermal Overload Relay in a Motor Contactor or Starter: The heater size for thermal overload protection is selected based on the manufacturer’s chart.
- Electronic Overload Protective Devices: Solid-state overload relays are commonly used in contactors or starters.
- Fuses for Overload Protection: When sized and used according to NEC 430.32(A) and 430.36, fuses provide effective overload protection.
- Circuit Breakers and Dual-Element Fuses: Inverse time circuit breakers and dual-element fuses offer both overload protection and short-circuit protection for motor branch circuit conductors when applied per NEC 430.32 and 430.55.
Good to Know:
- Short circuit and ground faults are not overload (NEC-100).
- Overload devices does not protect against short-circuit and ground faults.
- Overload protection is not required when it introduce additional or increased hazards e.g. in fire pumps – 430.31(A).
Sizing Overload Protection Devices
A continuous-duty motor rated above 1 HP and without integral thermal protection must be protected using an overload device sized according to NEC 430.32(A)(1) through (4). For example, a separate overload device is sized based on the motor’s service factor (SF) or temperature rise, ensuring that the circuit opens at no more than 125% of the motor’s nameplate full load amperes (FLA) rating.
Motors with a service factor of 1.15 or higher or a temperature rise of 40°C or less, the overload protective device must not exceed 125% of the motor’s nameplate FLA. For all other motors, the overload protective device must not exceed 115% of the FLA, as specified in NEC 430.6(A)(2).
If a motor fails to start due to overload protection sized according to 430.32(A)(1) and 430.32(B)(1), higher overload device ratings are allowed per 430.32(C)(1). The exceptions for higher overload device ratings are as follow:
For motors with a service factor of 1.15 or greater or a temperature rise of 40°C or less: The overload device can be sized up to 140% of the motor’s nameplate FLA. For all other motors, the overload device can be sized up to 130% of the motor’s nameplate FLA.
In short, overload device may be sized for:
- Single Motor: Overload relay settings must be 115% (when service factor is less than 1.15) to 125% (when nameplate service factor is 1.15 or more) of motor FLA.
- Multiple Motors: Individual overload devices required for each motor.
Combined OCPD
A combined OCPD is a single-unit device designed to protect a motor from overload, short circuits, and ground faults.
According to 430.55, a single OCPD can be used for small motors or grouped motor installations to provide protection against both overload and short-circuit faults (430.32 & 430.55).
When multiple motors (both single-phase and three-phase) are connected to the same feeder, the current varies across different lines (Line 1, Line 2, and Line 3). In such cases, the motor feeder “group” is determined by balancing the currents across the phases.
Unlike branch circuit protection, where the next size up protective device is allowed (NEC 430.52(C)(1)(A)), this rule does not apply to feeder protection.
Motor Controllers
NEC 430.81 required suitable controller for all motors such as contactor, soft starters etc. Article 430.82 mandates motor controllers design to be rated as per 430.83(A) for the motor load, with:
- Proper voltage and current ratings.
- Starting and stopping mechanisms.
- Capable of interrupting full-load locked-rotor current.
Motor controllers can be molded-case breakers and circuit breakers – 480.83(A). If other devices are used as motor controller, the HP rating must be at least equal to the motor horsepower.
A general-use snap switch can be used as a motor controller for motors rated 2 HP or less, provided that the switch’s ampere rating is at least 125% of the motor’s full load current (FLC). In other words, the rating of switch must not exceed 80% of FLC of the motor (430.83(C)(2)).
Overcurrent Protection for Motor Control Circuits
Motor control circuit conductors are separate wires used to control the ON/OFF or delay operations of a motor starter or contactor.
Circuits Tapped Before the Motor Overload Relay
If control circuit conductors are not tapped from the motor’s branch circuit, they require overcurrent protection as per NEC 724.43 (or Table 11(A) and Table 11(B) in Chapter 9) in accordance with 430.72(A). These circuits are classified as Class 1 remote-control circuits and must be protected accordingly.
Circuits Tapped After the Overload Relay
If control circuit conductors are tapped from the motor branch circuit OCPD and extend beyond the tap enclosure, they require overcurrent protection as per 430.72(B)(1) and based on the maximum rating of the overcurrent protective device listed in Table 430.72(B)(2).
- A separate OCPD or
- The motor branch circuit OCPD.
Disconnects for Motor and Control Circuit
A disconnecting means must be provided within sight of the motor and controller. According to NEC 430.75, two disconnects are required for motors. Each disconnect must:
- Disconnect the motor control circuit from the power source when necessary.
- Disconnect the motor and its controller from the power source when needed.
NEC 430.102 requires a disconnecting means for motor and control circuits:
- Readily accessible and lockable disconnects are required.
- Within sight of the motor unless a remote disconnecting device is lockable per NEC 430.102(B).
Types of Disconnecting Means
Per NEC 430.110, types of motor disconnects can be 7 types listed in 430.109(A)(1) through (7). e.g.
- Fused Disconnect Switches
- Molded-Case Circuit Breakers & Switches
- Instantaneous-Trip Circuit Breaker
- Motor HP Rated Switches
- Cord Connector (Rated at Motor HP)
- Flanged Surface Inlet
- HP Rated Attachment Plug and Receptacle
Good to Know: If the disconnecting means is not in sight, a lockable breaker (per NEC 110.25) can be used.
Adjustable-Speed Drives (ASDs)
The ampacity of conductors supplying Adjustable Speed Drives (ASDs) (which have multiple power ratings and currents) must be at least 125% of the ASD’s rated input current (430.122(A)).
The ampacity of conductors between the power conversion equipment and the motor must be at least 125% of the motor’s full load current (FLC) as listed in NEC Tables 430.247 through 430.250.
The ampacity of conductors supplying multiple motors or other loads, including power conversion equipment, must be rated according to NEC 430.24.
The disconnect switch used for an ASD must be rated at least 115% of the rated input current of the conversion unit (430.128).
Power conversion equipment circuits must be protected by a branch circuit protective device as required by NEC 430.130(A). The protective device sizing can be determined using: 430.52(C)(1), or the motor’s full load current (FLC) rating (NEC 430.6(A) & (B)).
NEC 430.124 governs adjustable speed drives (ASDs) and variable frequency drives (VFDs) which must:
- Provide adequate thermal and overcurrent protection.
- Be listed for their specific motor and voltage ratings.
- Incorporate protective features to prevent damage from harmonics or excessive inrush currents.
- VFDs must be listed and labeled for motor control applications.
- Must include integrated overload protection or require an external overload device.
- Conductors between the VFD and motor must be shielded to prevent EMI (Electromagnetic Interference)
Additional overload protection is not required if the ASD has built-in overload protection.
General Requirements for Motor Circuit Design
- Conduit and Raceway Sizing: Must accommodate conductor fill limits – (300.17).
- Grounding and Bonding: Motors must be properly grounded to prevent electric shock. The size of the equipment grounding conductor (EGC) must follow Table 250.122 based on the breaker or fuse size. (NEC 250.110 & 250.122)
- Voltage Drop Considerations: Voltage drop must not exceed 5% from the panel to the motor (210.19(A)(1)).
- Multi-motor Installations: Use group motor protection when multiple motors share a feeder.
Series Overview: Motor Circuit Calculations
- Part 1 – Motor Load Circuits: NEC Terms and Basic Terminologies
- Part 2 – NEC Requirements for Motor Circuits … (You are Here)
- Part 3 – Understanding NEMA Motor Nameplate Data
- Part 4 – Calculating Locked Rotor Current (LRC) for Motors
- Part 5 – Sizing Motor Branch Circuit Conductors
- Part 6 – Sizing Motor Feeder Conductors
- Part 7 – Sizing Motor Overcurrent Protection and OCPD’s Devices
- Part 8 – Sizing Motor Feeder Protection
- Part 9 – Sizing Motor Overload Protection
- Part 10 – Overcurrent Protection for Motor Control Circuits
- Part 11 – Sizing Disconnecting Means for Motor & Controller
- Part 12 – Sizing Motor Starter & Contactor – NEMA – NEC
- Part 13 – Sizing Direct Online (DOL) Starters/Contactors for Motors (*Bonus)
- Part 14 – Sizing Star-Delta Motor Starters/Contactors for Motors (*Bonus)
Resources & Tutorials:
- Cable Size Calculation for LT & HT Motors
- Three Phase Motor Power & Control Wiring Diagrams
- What is Motor Efficiency & How to improve it?
- Star Delta 3-phase Motor Automatic starter with Timer
- How to Run a Three-Phase Induction Motor on a Single-Phase Power Supply?
- How to Wire ST01 Timer with Relay & Contactor for 120V/240V Motors?
- How to Wire Twin Timer in Repeat Cycle & One-Shot Mode for 120V/240V Motors?
- How to Control a Single-Phase Motor from Multiple Locations?
- Automatic & Manual Control of Motor Using VFD & DOL Starter
- How to Reverse and Forward a Three-Phase Motor Using a VFD?
- How to Wire a VFD with Motor, PLC, Switches & External Devices
- Sequential Motor Control Circuit Using LOGO! V8 PLC
- Automatic Reverse Forward Motor Control Circuit Using Delta – DVP-14SS PLC
- Reverse Forward Motor Control Circuit Using PLC – ZEN Programming Relay
- Motor Protection – Types of Faults and Protection Devices
-
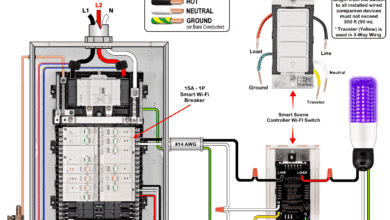 How to Wire Smart Scene Controller Switch
How to Wire Smart Scene Controller Switch
-
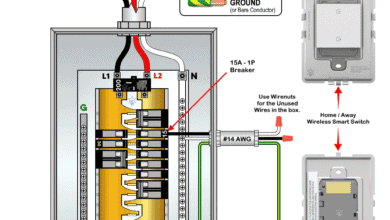 How to Install a Home and Away Wireless Smart Switch
How to Install a Home and Away Wireless Smart Switch
-
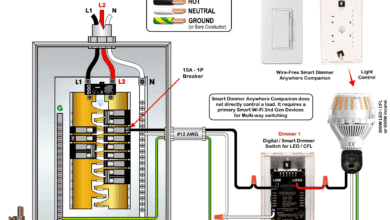 How to Install a Wire-Free Smart Dimmer Anywhere Companion
How to Install a Wire-Free Smart Dimmer Anywhere Companion
-
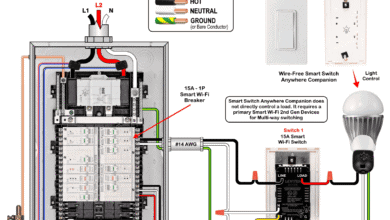 How to Wire a Smart Wireless Switch and Anywhere Companion
How to Wire a Smart Wireless Switch and Anywhere Companion
-
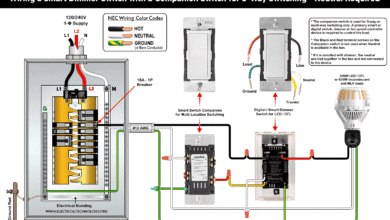
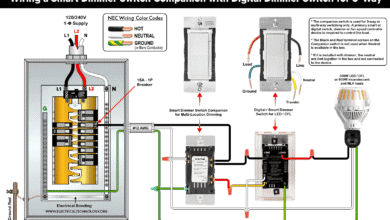 Wiring a Smart Dimmer Switch Companion with a Digital Dimmer
Wiring a Smart Dimmer Switch Companion with a Digital Dimmer
-
 How to Wire a Digital and Wi-Fi Smart LED Dimmer Switch
How to Wire a Digital and Wi-Fi Smart LED Dimmer Switch