Difference Between Servo Motor and Stepper Motor
What is the Main Difference Between Servo Motor and Stepper Motor?
The Servo motor and stepper motor are both two different types of motor used for positioning. However, they are quite different in almost every other aspect both having several pros and cons. Both of them are widely used in industries. Neither of them is the perfect but the best solution for a certain problem.
What is a Motor?
A motor is an electrical machine that converts electrical energy into mechanical energy. A power source such as a generator or battery is used to supply electrical power and it converts it into rotational motion which can be converted into linear motion.
A motor consists of two main parts; stator and rotor. The stator is the stationary part while the rotor is the rotating part. A generic motor works on the principle of Fleming’s left-hand rule. Simply put, the stator produces a rotating magnetic field that interacts with the rotor’s magnetic field and starts rotation.
There are several types of motors mainly used for generating rotational motion. The Servo motor and stepper motor are used for precise positioning and control over its rotating shaft.
- Related Post: Difference Between Brushed and Brushless Motor
What is Servo Motor?
A servo motor is a closed-loop motor that is used to provide accurate positioning and speed. It utilizes an encoder to sense the position of the rotor and provide a feedback signal. The closed loop system that has several components allows it to continuously monitor its position and generate an error signal until the motor reaches the desired position. It can achieve any angular position with the required angular velocity.

The servo motor works on the principle of servomechanism. It consists of a DC motor, gear system, position sensor and feedback system. The output sensor continuously monitors the position of the rotor and sends the output signal to compare with the input reference signal. The feedback system compares the input reference signal with the output signal using a comparator and generates the difference between both signals. This signal serves as the input signal for the motor and it exists as long as there is a difference between the input and output signal. This is how it achieves accurate positioning.
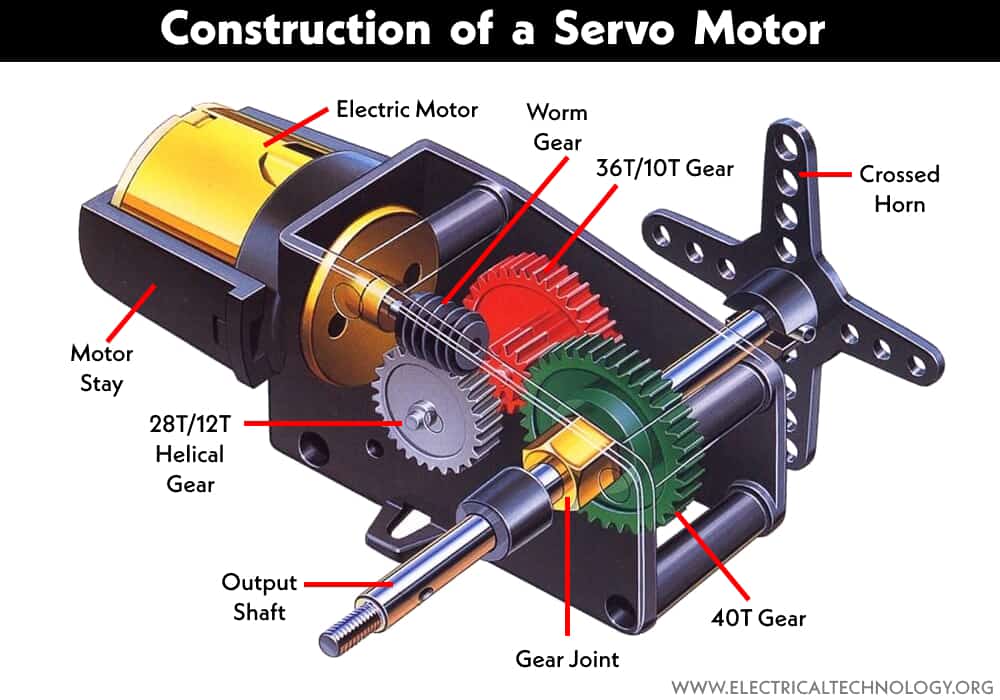
Construction-wise, the servo motor consists of a rotor made of a permanent magnet and a stationary stator carrying stator windings. When the input current is applied, the stator’s winding generates a rotating magnetic field that interacts with the magnetic field of the rotor resulting in rotational motion. It has very few number of poles about 4-12. Therefore it has very high speed with very high torque. The high speed is converted into torque using a gearbox. They have a larger size and it isn’t affected by mechanical vibrations.
On the other hand, servo motors are very expensive in addition to the cost of the encoder, gearbox, etc. The cost of a servo motor exceeds that of a stepper motor.
- Related Post: Difference between Synchronous and Asynchronous Motor
What is Stepper Motor?
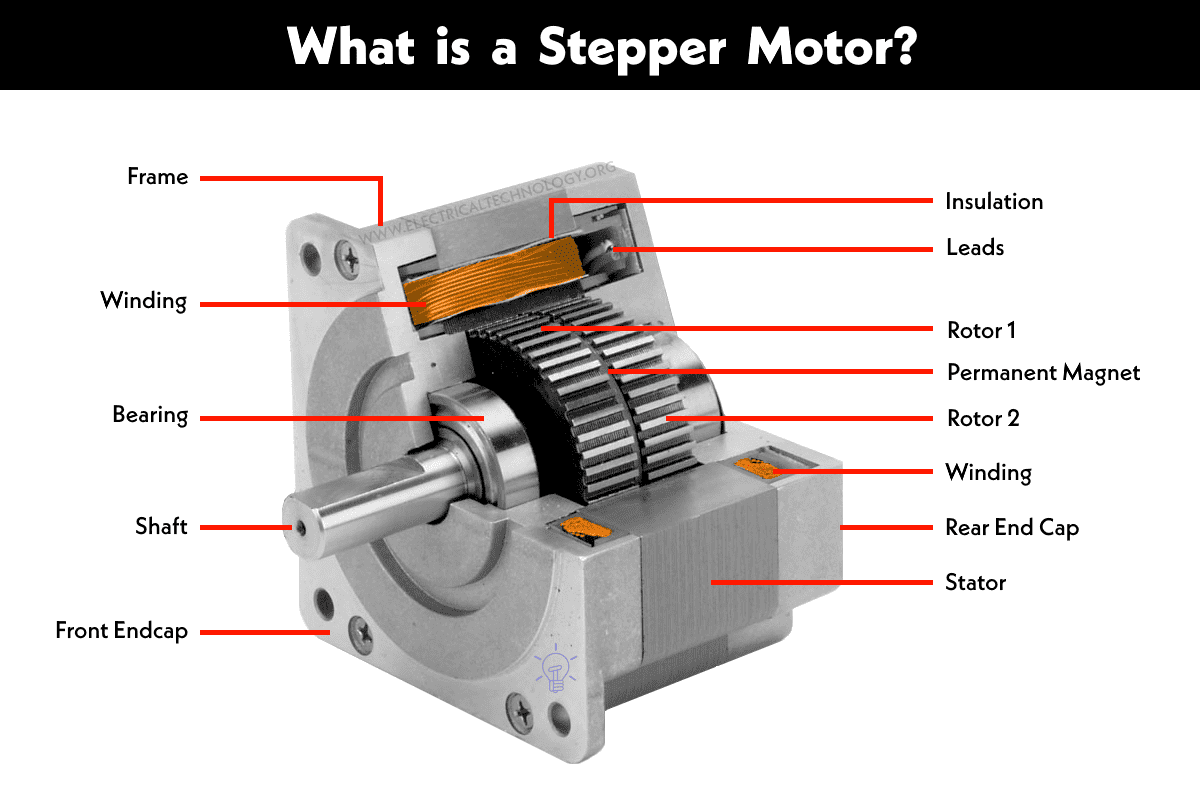
A stepper motor is a type of brushless DC motor that rotates in discrete steps hence the name stepper motor. It is made of a permanent magnet rotor and stator carrying several windings. The windings are arranged to generate a number of poles above 50 or so. The driver circuitry uses the input power source to energize each coil in a sequence forming a rotating magnetic field that rotates in discrete steps. The rotor follows this RMF in steps. Since the pole count is very high, the motion appears continuous.
The stepper motor does not require a feedback system and runs on an open loop system which is why it is cost-efficient as compared to a servo motor. The open loop system causes it to have a very simple operation. The Stepper motor has a relatively low speed and torque. The torque can be increased using a gearbox but it significantly decreases the speed of the motor. Although it generates very high torque at zero speed that gradually decreases with speed.
Due to the high pole count, stepper motors provide great precision in motion control. And it has high torque at low speed. However, it generates vibration and heat which can cause issues in certain applications.
Differences Between Servo Motors and Stepper Motors
The following table shows a comparison between stepper and servo motors.
| Servo Motor | Stepper Motor |
| A Servo motor is a type of motor that operates on the principle of servomechanism to provide rotor positioning. | A stepper motor is a type of motor that rotates in discrete steps to provide precise rotation. |
| It is used in a closed-loop system with an encoder that provides the exact position of the rotor | It is configured in an open loop system that only operates on the input pulse. |
| There is a feedback system in the servo motor. | There is no feedback system in the stepper motor. |
| The width of the input pulse determines the position of the rotor known as PWM(pulse width modulation) | The number of input pulses determines the number of steps taken by the stepper motor. |
| The Servo motor is prone to hunting at zero speed. | There is no hunting at zero speed. |
| The synchronous operation is relatively difficult to achieve. | The synchronous operation is easier to achieve. |
| It has a high operating speed | It has a low operating speed. |
| The Servo motor generates high torque at high speed. | The Stepper motor generates high torque at zero or low speed. |
| The Servo motor has a complex design including an encoder, gearbox, etc. | The Stepper motor has a relatively simple design. |
| The Servo motor generates relatively less noise | The Stepper motor generates relatively more noise. |
| The Servo motor doesn’t generate heat. | The Stepper motor generates heat during operation. |
| Servo motors consume relatively less power | Stepper motors consume more power. |
| It is comparatively more efficient than a stepper motor. | It is less efficient than servo motors. |
| The Servo motor cannot handle fluctuations in load and inertia. | Stepper motors are best suitable for fluctuating loads. |
| It is less reliable as compared to the stepper motor. | It is more reliable than a servo motor. |
| It is relatively expensive. | It is cheaper than a servo motor. |
| It has a short life span due to wear, tear and brushes. | It has a longer life span as it is a brushless motor. |
| The Servo motor requires tuning and adjustment | The stepper motor does not need tuning and adjustment. |
Comparison Between Servo and Stepper Motors

Definition
- The term ‘servo’ refers to the configuration in which a motor is used in a closed-loop system providing continuous feedback of the position of the motor.
- The term ‘stepper’ refers to the movement of the motor in discrete steps controlled by applying pulses in a sequence.
Feedback System
- The servo motor has a closed-loop system that provides feedback using a position sensor. It constantly monitors the position and compares it with the input-applied signal for accurate positioning.
- The Stepper motor is a brushless DC motor in an open loop configuration having no feedback. The train of input pulses rotates the rotor in steps to acquire positioning.
Torque
- The servo motor provides high torque at high speed. Therefore it is used in torque control applications.
- The stepper motor has high torque at low speed which reduces as the speed gradually increases.
Speed
- The servo motor provides a very high operating speed in the range of 5000 RPM.
- The stepper motor has a lower operating speed in the range of 1500 RPM.
Stability
- Servo motors are not stable due to the presence of hunting even at a standstill. It oscillates about its steady state position.
- The Stepper motor is very stable and must be used in applications that require holding the load steady in place.
Design
- Design-wise, the servo motor is complex due to the involvement of the gearbox and feedback system.
- The stepper motor has an open loop system therefore it is very simple.
Hunting
In motors, hunting is a phenomenon that causes the rotor to oscillate about a steady state position. It occurs due to sudden changes in the load. The rotor starts hunting for the new synchronous speed.
- The Servo motor is affected by hunting this is why the synchronous operation is difficult in the servo motor.
- There is no hunting in the stepper motor.
Cost
- The servo motor is more costly as compared to the stepper motor due to the presence of a gearbox, encoder and feedback system.
- The stepper motor is cheaper for its open-loop and simple design.
Maintenance
- Due to the complex design of the servo motor including the gearbox and feedback mechanism, it requires frequent maintenance. On top of that the brushes also need replacement after some time.
- As the stepper motor is a brushless motor, the only part that needs maintenance is the ball bearings. Therefore it is maintenance-free.
Micro stepping
Micro stepping is a technique used in stepper motors to further reduce the step size. It increases the resolution of the motor by dividing the current between the two poles. However, micro-stepping reduces the torque of the motor.
Related Posts:
- Difference Between Single Phase & Three Phase Induction Motor
- Difference Between a Transformer and an Induction Motor
- Difference Between AC and DC Motors
- Difference Between AC and DC Generator
- Difference Between Alternator and Generator
- Difference between AC Drives and DC Drives
- Single-Phase Induction Motor
- Three-Phase Induction Motor
- DC Machine – Construction, Working, Types and Applications
- Speed Control of DC Motor – Voltage, Rheostatic & Flux Control Methods
- Cable Size Calculation for LT & HT Motors.
- What is Motor Starter? Types of Motor Starters and Motor Starting Methods
- Direct Online Starter – DOL Starter Wiring Diagram for Motors
- Three Phase Motor Power & Control Wiring Diagrams
- Electric Motors Symbols
- Types of Electric Motors
- Applications of Electric Motors