NEC Terms and Basic Terminologies Used in Motor Load Circuits
Before designing an effective motor circuit that operates as expected based on analysis and calculations, it is important to understand key terms related to electric motors in accordance with NEC 2023. Many terms are often used interchangeably but have distinct meanings. For example, Full Load Amps (FLA) vs. Full Load Current (FLC) and continuous load vs. continuous duty etc.
Understanding these fundamental electrical terminology, industry-specific slang, and the language used in electrical codes is essential. This knowledge helps in designing a motor circuit that meets the required specifications and applications. Additionally, it ensures the selection of an appropriate motor for a specific load while complying with codes and regulations.

Why are Motor Circuits Different from General Circuits?
Motor circuits are more complex than standard electrical circuits due to their unique electrical characteristics.
When a motor starts, it draws a very high current, known as inrush current, which is typically 6 to 8 times higher than its full load current (FLC). This occurs because induction motors are inductive loads, and at the moment of startup, the stator winding offers almost zero impedance to the applied voltage. As a result, the motor initially draws a large amount of current. Once the rotor reaches its rated speed, the counter-electromotive force (Back EMF) is generated, reducing the current to its normal operating level.
If the motor’s armature (rotating part) is jammed or unable to rotate, no Back EMF is generated. In this case, the motor will continue to operate at its locked-rotor current (LRC), which is 6 to 8 times higher than the normal running current. The exact value of LRC depends on the Code Letter marking on the motor nameplate, as specified in NEC 430.7(B).
If the excessive current is not quickly reduced to normal levels, the motor windings may overheat, leading to potential short circuits, motor damage, or even a fire hazard. That’s why we do we need a starter in the motor circuits.
Due to these significant differences, sizing branch circuit conductors for a general load differs from sizing them for motor load circuits. Understanding the fundamental terms and formulas are essential for motor circuit design, troubleshooting, and calculations. We will be using these terms in accordance with the NEC in the upcoming parts of the Motor Circuit Calculations Series (Parts links in the end of this article).
Terms Used in Motor’s Circuits
Here are the definitions and explanations of terms used in motor’s circuit according to the National Electrical Code (NEC), specifically focusing on Article 430 for motor load circuits:
Ampacity
The maximum amount of electrical current a conductor can carry continuously without exceeding its temperature rating. (NEC 100 and Table 310.16).
Ampacity is determined based on conductor size, insulation type, ambient temperature, and conditions of use. NEC Table 310.16) provides ampacity values for different conductors under standard conditions. For motor circuits, conductor ampacity must be sized appropriately to handle motor full-load currents (FLC) while considering continuous duty and other correction factors.
Full-Load Current (FLC) & FLA
The current drawn by a motor when operating at its rated voltage and horsepower under full-load conditions. (NEC 430.6(A)(1) and 430.22(A) to (G), Tables 430.247 through 430.250).
NEC 430.6 requires using Tables 430.247 through 430.250 for determining FLC values for motors instead of nameplate values for sizing conductors, overload protection, and circuit breakers. These tables provides FLC values based on motor type, phase (single-phase or three-phase), and voltage rating. These values are used for proper sizing of conductors, overcurrent protection, and overload protection devices for motor circuits.
Good to Know: FLC is the amperes of motor running at full load used to size breaker and wire size for motors while FLA is the rating of current printed on motor’s nameplate used to determine the overload protection.
Motor Branch-Circuit & Protection
The circuit that supplies power from the main distribution panel or feeder to the motor and its controller.
These includes wiring used for overload protection, short-circuit protection, and the motor controller. NEC 430.22(A) & 430.31 cover protection and sizing of motor branch-circuits based on Table 310.16. Hence, it insures they are sized properly to handle motor starting currents and continuous operation.
The branch circuit protection is determined based on the full load current (not FLA) using Table 430.52(C)(1) showing the maximum rating or setting of OCPD’s devices.
Overcurrent protection devices OCPDs (fuse & circuit breakers) in a motor branch circuit only protect the motor, control circuit, and branch-circuit conductors from short circuits and ground faults (430.51). They do not protect against overload.
Feeder for Motor (NEC 430)
A feeder is a circuit that supplies power to one or more motor branch circuits.
Motor feeders must be sized to carry the total calculated load of all connected motors and other equipment.
The feeder ampacity must be at least 125% of the largest motor FLC plus the sum of the FLC of other motors on the feeder. (430.6(A), 430.17, 430.24 & 430.25)
A feeder supplying motor(s) must include proper overcurrent protection to safeguard against faults. The feeder protection are sized based on 430.62 and 430.63 permitted by 440.22, 430.52 and 430.62.
Overloads
Overcurrent protection devices that prevent motors from overheating due to excessive current draw. (NEC 430.32)
Overload protective devices protect motors from overheating, which can occur due to mechanical failures, locked rotor conditions, or sustained high inrush current. Overload devices may include thermal overload relays, fuses, or electronic protection. Overload protection for motors are sized based on FLA of motor’s nameplate data in accordance with 430.32(A)(1), 430.6(A)(2) and 430.55.
NEC 430.32(A)(1) requires overload protection to be set at:
-
-
- 115% of FLC for motors with a service factor of 1.15 or higher.
- 125% of FLC for motors with a service factor less than 1.15.
-
Overload protection devices do not provide protection against short circuits or ground faults in the branch circuit. They only protect against excessive current caused by overload conditions.
Horsepower (HP)
A unit of power used to rate the mechanical output of motors. The HP is a traditional unit of power which is necessary to lift a total mass of 550 foot pounds in one second.
1HP = 550 ft.lb / sec
or
1 HP ≈ 746 Watts
Motor HP ratings determine full-load ampere (FLA) or full load current (FLC), conductor sizing, and protective device selection. NEC Tables 430.257 though 340.250 provides FLC values based on HP for different types of motors and circuit calculations.
Higher HP motors especially in industrial applications require larger conductors, higher-rated circuit breakers, and proper overload protection.
Locked Rotor Current (LRC)
LRC is the initial surge of current drawn by an electric motor when it starts from a standstill (zero speed) with full voltage applied to its terminals. This current is significantly higher than the motor’s Full Load Amps (FLA) and occurs because, at startup, the motor lacks back electromotive force (EMF) to oppose the applied voltage.
LRC is typically 5 to 8 times the motor’s Full Load Amps (FLA), depending on the motor design and type. This high current lasts until the motor gains speed and develops sufficient back EMF to reduce the current draw.
NEC Table 430.7(B) provides code letters (A through V) stamped on motor nameplates, indicating the approximate LRC as a multiple of rated horsepower (HP). Higher code letters indicate higher inrush currents, influencing the selection of proper conductors, protection devices, and controllers.
The value of LRC is considered for sizing overcurrent protection devices (OCPDs) for motor branch circuit protection (430.52) and motor starter and overload protection (430.32).
Continuous Load
A load where the maximum current is expected to continue for three hours or more. (NEC 100 & 210.19(A)(1)(a)).
HVAC loads and motors running continuously for three hours or more are considered continuous loads. NEC 210.19(A)(1)(A) requires that branch circuits supplying continuous loads have conductors sized at 125% of the load current to account for heat buildup and ensure safe operation.
Continuous Duty
- Operation of a motor at a substantially constant load for an indefinitely long period. (NEC 430.22 & 430.32)
For motors operating under continuous duty, the branch-circuit conductor ampacity must be at least 125% of the motor’s full-load current. (430.22). Overload protection must be selected based on 115% to 125% of the motor’s full-load current for motors with continuous duty. 430.32.
Basic Motor Circuit Terminologies
Beside the NEC and terms used by electricians, here are additional basic terms related to electric motor circuits for newbies and apprentices,
Electrical Parameters:
- Voltage (V): The potential difference applied to the motor, measured in volts (V). For instance, 120V, 240V, or 480V in AC circuits.
- Current (I): The electrical current drawn by the motor, measured in amperes (A).
- Power (P): The rate at which electrical energy is converted into mechanical work, measured in watts (W) or kilowatts (kW).
- Power Factor (PF): The ratio of real power to apparent power, typically ranging from 0.7 to 0.95 for motors.
- Efficiency (η): The ratio of output mechanical power to input electrical power, given as a percentage (%). Efficiency of motor is printed in % on motor’s nameplate.
Motor Ratings & Performance:
- Full Load Current (FLC): The current drawn by a motor when operating at its rated load.
- Locked Rotor Current (LRC): The high starting current when the rotor is not moving. Also called inrush current.
- Service Factor (SF): A multiplier that indicates how much overload a motor can handle safely. Example: A motor with SF = 1.15 can operate at 15% more than its rated power without damage.
- Torque: The rotational force generated by the motor, measured in Newton-meters (Nm).
- Slip: The difference between the synchronous speed and actual rotor speed in an induction motor, given as a percentage.
Protection & Control:
- Overload Protection: Protects the motor from excessive current that can cause overheating.
- Short Circuit Protection: Devices like fuses or circuit breakers prevent damage due to faults.
- Ground Fault Protection: Detects leakage currents to prevent electric shocks and fires.
- Motor Circuit Breaker (MCB): A protective device specifically designed for motor applications.
- Contactor: An electrically controlled switch used for motor control circuits.
- Thermal Relay: A thermal overload relay protects against overcurrent by sensing excessive heat.
Motor Circuit Calculations:
- Real Power (P): Measured in W (watts), calculated as:
P = V × I × Cos (θ)
- Reactive Power (Q): Measured in VAR (volt-ampere reactive), calculated as:
Q = V × I × sin(θ)
- Apparent Power (S): Measured in VA (volt-amperes), calculated as:
S = V × I
- Horsepower (HP): A common unit for motor power, where:
1HP = 746W
- Wire Size Selection: Based on FLC, voltage drop, and NEC Table 310.16.
- Breaker Sizing: Typically 125% of full-load current for motor protection.
- P.F Correction: Capacitor sizing used to improve power factor and efficiency of the system.
Series Overview: Motor Circuit Calculations
- Part 1 – Motor Load Circuits: NEC Terms and Basic Terminologies … (You are Here)
- Part 2 – NEC Requirements for Motor Circuits
- Part 3 – Understanding NEMA Motor Nameplate Data
- Part 4 – Calculating Locked Rotor Current (LRC) for Motors
- Part 5 – Sizing Motor Branch Circuit Conductors
- Part 6 – Sizing Motor Feeder Conductors
- Part 7 – Sizing Motor Overcurrent Protection and OCPD’s Devices
- Part 8 – Sizing Motor Feeder Protection
- Part 9 – Sizing Motor Overload Protection
- Part 10 – Overcurrent Protection for Motor Control Circuits
- Part 11 – Sizing Disconnecting Means for Motor & Controller
- Part 12 – Sizing Motor Starter & Contactor – NEMA – NEC
- Part 13 – Sizing Direct Online (DOL) Starters/Contactors for Motors (*Bonus)
- Part 14 – Sizing Star-Delta Motor Starters/Contactors for Motors (*Bonus)
Resources & Tutorials:
- Cable Size Calculation for LT & HT Motors
- Three Phase Motor Power & Control Wiring Diagrams
- What is Motor Efficiency & How to improve it?
- Star Delta 3-phase Motor Automatic starter with Timer
- How to Run a Three-Phase Induction Motor on a Single-Phase Power Supply?
- How to Wire ST01 Timer with Relay & Contactor for 120V/240V Motors?
- How to Wire Twin Timer in Repeat Cycle & One-Shot Mode for 120V/240V Motors?
- How to Control a Single-Phase Motor from Multiple Locations?
- Automatic & Manual Control of Motor Using VFD & DOL Starter
- How to Reverse and Forward a Three-Phase Motor Using a VFD?
- How to Wire a VFD with Motor, PLC, Switches & External Devices
- Sequential Motor Control Circuit Using LOGO! V8 PLC
- Automatic Reverse Forward Motor Control Circuit Using Delta – DVP-14SS PLC
- Reverse Forward Motor Control Circuit Using PLC – ZEN Programming Relay
- Motor Protection – Types of Faults and Protection Devices
- National Electrical Code (NEC) Requirements for Panelboards
-
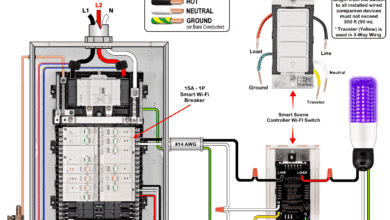 How to Wire Smart Scene Controller Switch
How to Wire Smart Scene Controller Switch
-
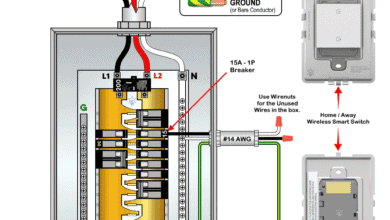 How to Install a Home and Away Wireless Smart Switch
How to Install a Home and Away Wireless Smart Switch
-
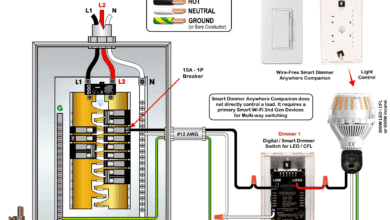 How to Install a Wire-Free Smart Dimmer Anywhere Companion
How to Install a Wire-Free Smart Dimmer Anywhere Companion
-
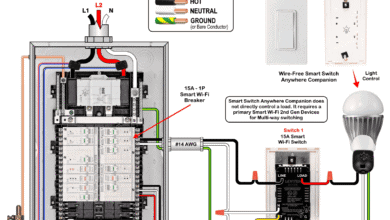 How to Wire a Smart Wireless Switch and Anywhere Companion
How to Wire a Smart Wireless Switch and Anywhere Companion
-
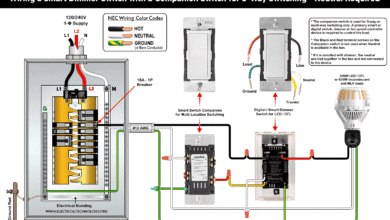
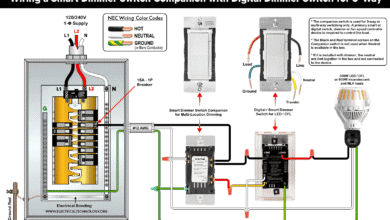 Wiring a Smart Dimmer Switch Companion with a Digital Dimmer
Wiring a Smart Dimmer Switch Companion with a Digital Dimmer
-
 How to Wire a Digital and Wi-Fi Smart LED Dimmer Switch
How to Wire a Digital and Wi-Fi Smart LED Dimmer Switch