5000+ Electrical and Electronic Engineering Formulas & Equations
List of All Electrical and Electronics Engineering Formulas
Note: Click on the desired box button below to see the related electrical and electronics engineering formulas and equation with details.

Basic Electrical Engineering Formulas & Equations
Basic Electrical Quantities Formulas
Ohm’s, Kirchhoff’s & Coulomb’s Laws – Formulas
Voltage & Current Divider Rules (VDR & CDR) Equations
Power Formulas in DC & AC Single & Three-Phase Circuits
Resistance, Conductance, Impedance & Admittance Formulas
Resistance, Capacitance & Inductance in Series/Parallel Formulas
Formula and Equations For Capacitor and Capacitance
Formula and Equations For Inductor and Inductance
Electric & Magnetic Flux, Density & Intensity Formulas
Magnetic Terms used in Magnetic Circuits – Definition & Formulas
Power, Voltage & EMF Equation of a DC Motor – Formulas
DC Generator Formulas and Equations
Losses in Electrical Machines – Formulas & Equations
Induction Motor & Linear Induction Motors Formulas & Equations
Synchronous, Stepper & AC Motors Formulas & Equations
Synchronous Generator & Alternator Formulas & Equations
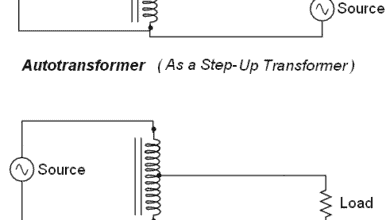
Transformer Formulas and Equations
Equations & Formulas For RLC Circuits (Series & Parallel)
Time Constant τ “Tau” Formulas for RC, RL & RLC Circuits
Diode Formulas & Equations – Zenner, Schockley & Rectifier
Bipolar Junction Transistor (BJT) – Formulas & Equations
Operational Amplifier (OP-AMP) – Formulas & Equations
Active & Passive Frequency Filters – Formulas & Equations
Related Posts:
- Basic Electrical / Electronic Symbols
- Electrical & Electronic Engineering Symbols
- 800+ Electrical & Electronic Abbreviations with Full Forms. A-Z
- Types of Electrical Drawing and Diagrams
- Top Must Have Android Apps for Electrical & Electronics Engineers & Students
- Top iOS Apps for Electrical & Electronics Engineers & Students
- Electrical and Electronics Engineering Calculators
- Electrical Wiring Color Codes for AC & DC – NEC & IEC





This is good for electrical knowledge.
I feel happy to join with you.
this is really a good site for elect engineers
I am trying to find a formula to show as the winding temperature of a motor or the core temperature changes up or down it has a direst effect on the energy consumption. For example. for every degree in temperature reduction is worth “X” in energy.